ในสภาพแวดล้อมการผลิตทางอุตสาหกรรมที่ก้าวหน้าอย่างรวดเร็ว ความเรียบของพื้นผิวผลิตภัณฑ์เป็นตัวบ่งชี้คุณภาพของผลิตภัณฑ์ที่สำคัญ การตรวจสอบความเรียบถูกนำมาใช้กันอย่างแพร่หลายในอุตสาหกรรมต่างๆ เช่น การผลิตยานยนต์ การบินและอวกาศ และอิเล็กทรอนิกส์ ตัวอย่างเช่น การตรวจสอบความเรียบของแบตเตอรี่หรือตัวเครื่องโทรศัพท์มือถือในอุตสาหกรรมยานยนต์ และการตรวจสอบความเรียบของแผง LCD ในอุตสาหกรรมเซมิคอนดักเตอร์
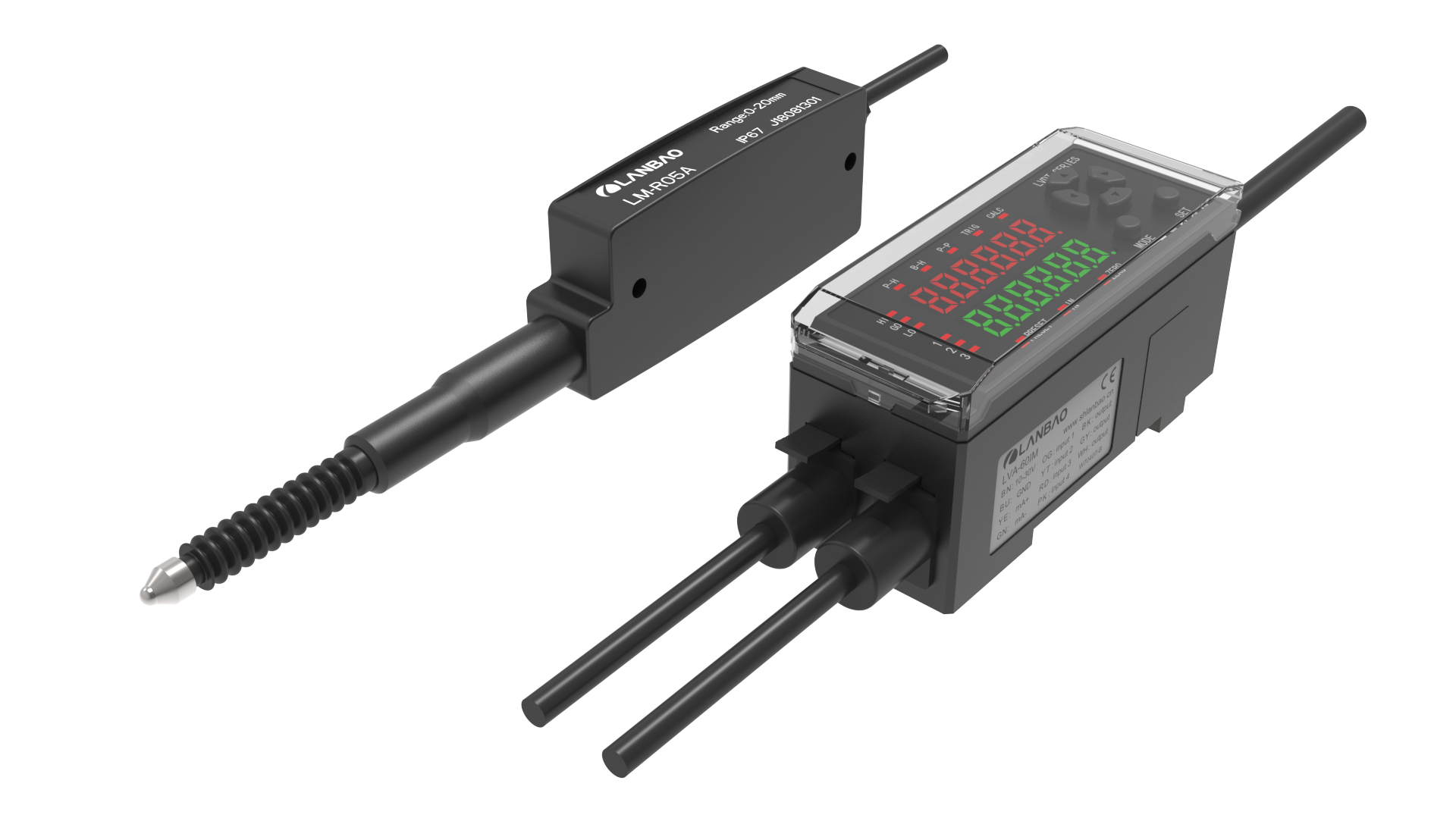
อย่างไรก็ตาม วิธีการตรวจวัดความเรียบแบบดั้งเดิมนั้นประสบปัญหา เช่น ประสิทธิภาพต่ำและความแม่นยำไม่ดี ในทางตรงกันข้าม เซ็นเซอร์ LVDT (Linear Variable Differential Transformer) มีข้อดีคือความแม่นยำสูง ความน่าเชื่อถือสูง และการวัดแบบไร้แรงเสียดทาน (ตัวอย่างเช่น LVDT ใช้หัววัดสัมผัสกับพื้นผิวของวัตถุ ขับเคลื่อนการเคลื่อนที่ของแกนกลางเพื่อให้ได้การวัดแบบไร้แรงเสียดทานและมีความแม่นยำสูง) จึงถูกนำมาใช้กันอย่างแพร่หลายในการตรวจวัดความเรียบของวัตถุในปัจจุบัน
หลักการทำงาน:
การวัดแบบไร้แรงเสียดทาน:โดยปกติแล้วจะไม่มีการสัมผัสทางกายภาพระหว่างแกนเคลื่อนที่กับโครงสร้างขดลวด ซึ่งหมายความว่า LVDT เป็นอุปกรณ์ไร้แรงเสียดทาน คุณสมบัตินี้ช่วยให้สามารถใช้งานในการวัดที่สำคัญซึ่งไม่สามารถทนต่อแรงเสียดทานได้
อายุการใช้งานเชิงกลไม่จำกัดเนื่องจากโดยปกติแล้วแกนกลางและโครงสร้างขดลวดของ LVDT จะไม่สัมผัสกัน ทำให้ไม่มีชิ้นส่วนใดเสียดสีกันหรือสึกหรอ ส่งผลให้ LVDT มีอายุการใช้งานเชิงกลที่แทบจะไม่มีขีดจำกัด ซึ่งมีความสำคัญอย่างยิ่งในแอปพลิเคชันที่ต้องการความน่าเชื่อถือสูง
ความละเอียดอนันต์LVDT สามารถวัดการเปลี่ยนแปลงตำแหน่งของแกนกลางที่เล็กมากได้อย่างแม่นยำ เนื่องจากทำงานบนหลักการเหนี่ยวนำทางแม่เหล็กไฟฟ้าในโครงสร้างที่ปราศจากแรงเสียดทาน ข้อจำกัดเพียงอย่างเดียวของความละเอียดคือสัญญาณรบกวนในตัวปรับสภาพสัญญาณและความละเอียดของจอแสดงผลเอาต์พุต
ความสามารถในการทำซ้ำจุดศูนย์:ตำแหน่งจุดศูนย์ที่แท้จริงของ LVDT มีความเสถียรและสามารถทำซ้ำได้สูงมาก แม้ในช่วงอุณหภูมิการทำงานที่กว้างมาก ทำให้ LVDT ทำงานได้ดีในฐานะเซ็นเซอร์ตำแหน่งศูนย์ในระบบควบคุมแบบวงปิด
การปฏิเสธแบบไขว้แกน:LVDT มีความไวต่อการเคลื่อนที่ตามแนวแกนของแกนสูงมาก และค่อนข้างไม่ไวต่อการเคลื่อนที่ในแนวรัศมี ทำให้สามารถใช้ LVDT ในการวัดแกนที่ไม่เคลื่อนที่ในแนวเส้นตรงที่แม่นยำได้
การตอบสนองแบบไดนามิกที่รวดเร็ว:การไม่มีแรงเสียดทานในระหว่างการทำงานปกติทำให้ LVDT สามารถตอบสนองต่อการเปลี่ยนแปลงตำแหน่งของแกนกลางได้อย่างรวดเร็วมาก การตอบสนองแบบไดนามิกของเซ็นเซอร์ LVDT นั้นถูกจำกัดโดยผลกระทบจากแรงเฉื่อยของมวลเล็กน้อยของแกนกลางเท่านั้น
ผลผลิตสัมบูรณ์:สัญญาณเอาต์พุตของ LVDT เป็นสัญญาณอนาล็อกที่สัมพันธ์โดยตรงกับตำแหน่ง หากเกิดไฟดับ สามารถทำการวัดต่อได้โดยไม่ต้องปรับเทียบใหม่ (ต้องเปิดไฟกลับมาเพื่อรับค่าการเคลื่อนที่ปัจจุบันหลังจากไฟดับ)
- การตรวจจับความเรียบของพื้นผิวชิ้นงาน: โดยการสัมผัสพื้นผิวของชิ้นงานด้วยหัววัด LVDT จะสามารถวัดความแปรผันของความสูงบนพื้นผิวได้ ซึ่งจะช่วยประเมินความเรียบของพื้นผิวได้
- การตรวจจับความเรียบของแผ่นโลหะในกระบวนการผลิตแผ่นโลหะ การจัดเรียง LVDT แบบเป็นแถว ร่วมกับกลไกการสแกนอัตโนมัติ สามารถทำแผนที่ความเรียบของพื้นผิวแผ่นโลหะขนาดใหญ่ได้อย่างทั่วถึง
- การตรวจจับความเรียบของแผ่นเวเฟอร์:ในอุตสาหกรรมเซมิคอนดักเตอร์ ความเรียบของแผ่นเวเฟอร์มีผลกระทบอย่างมากต่อประสิทธิภาพของชิป LVDT สามารถใช้ในการวัดความเรียบของพื้นผิวเวเฟอร์ได้อย่างแม่นยำ (หมายเหตุ: ในการตรวจวัดความเรียบของเวเฟอร์ LVDT จำเป็นต้องมีหัววัดน้ำหนักเบาและการออกแบบที่มีแรงสัมผัสต่ำ ทำให้เหมาะสำหรับสถานการณ์ที่ไม่อนุญาตให้เกิดความเสียหายกับพื้นผิว)
- ความแม่นยำระดับไมโครเมตร
- มีให้เลือกหลายขนาดตั้งแต่ 5-20 มม.
- ตัวเลือกเอาต์พุตที่ครอบคลุม รวมถึงสัญญาณดิจิทัล อนาล็อก และ 485
- แรงกดหัวเซ็นเซอร์ต่ำเพียง 3N สามารถตรวจจับได้โดยไม่ทำให้เกิดรอยขีดข่วนบนพื้นผิวทั้งโลหะและกระจก
- ขนาดภายนอกที่หลากหลาย เพื่อตอบสนองการใช้งานในพื้นที่ต่างๆ
- คู่มือการเลือก
| พิมพ์ | ชื่อชิ้นส่วน | แบบอย่าง | แรง | ความเป็นเส้นตรง | ความสามารถในการทำซ้ำ | เอาต์พุต | ระดับการป้องกัน |
| โพรบแบบผสม | เครื่องขยายเสียง | LVA-ESJBI4D1M | / | / | / | กระแสไฟ 4-20mA, เอาต์พุตดิจิทัลสามทาง | IP40 |
| หัววัดตรวจจับ | LVR-VM15R01 | 0-15 มม. | ±0.2%FS (25℃) | 8 ไมโครเมตร (25℃) | / | IP65 | |
| แอลวีอาร์-วีเอ็ม10อาร์01 | 0-10 มม. | ||||||
| แอลวีอาร์-วีเอ็ม5อาร์01 | 0-5 มม. | ||||||
| ประเภทบูรณาการ | การตรวจจับแบบบูรณาการ prbe | LVR-VM20R01 | 0-20 มม. | ±0.25%FS (25℃) | 8 ไมโครเมตร (25℃) | อาร์เอส485 | |
| LVR-VM15R01 | 0-15 มม. | ||||||
| แอลวีอาร์-วีเอ็ม10อาร์01 | 0-10 มม. | ||||||
| แอลวีอาร์-วีเอ็ม5อาร์01 | 0-5 มม. | ||||||
| แอลวีอาร์-เอสวีเอ็ม10ดีอาร์01 | 0-10 มม. |
วันที่เผยแพร่: 11 กุมภาพันธ์ 2568