El sensor fotoeléctrico emite luz visible y luz infrarroja a través del transmisor y luego a través del receptor para detectar la luz reflejada por el objeto de detección o los cambios de luz bloqueados, a fin de obtener la señal de salida.
Principios y tipos principales
Es iluminado por el elemento emisor de luz del transmisor y recibido por el elemento receptor de luz del receptor.
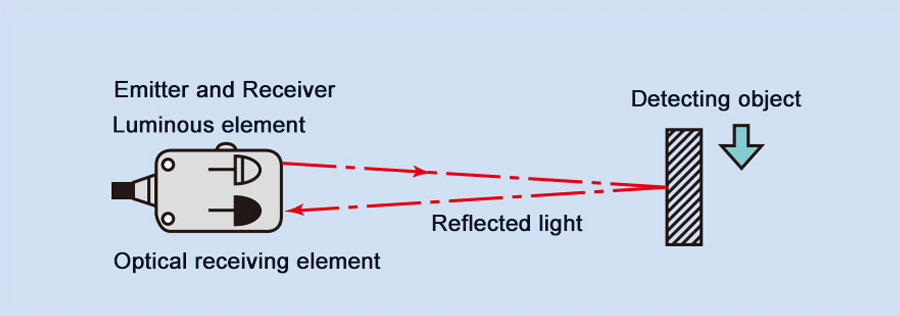
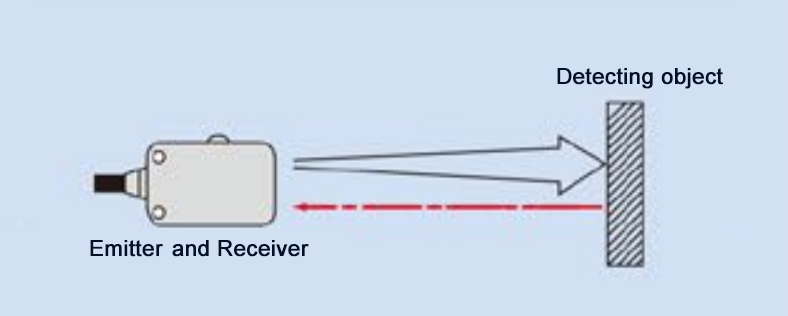
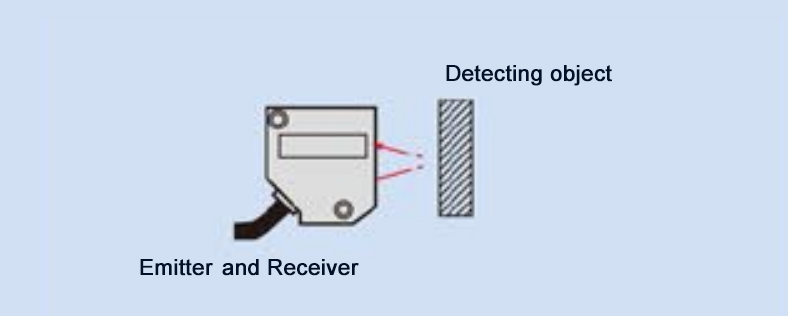
Reflexión difusa
El elemento emisor de luz y el elemento receptor de luz están integrados en un sensor.
En el amplificador. Recibe la luz reflejada del objeto detectado.
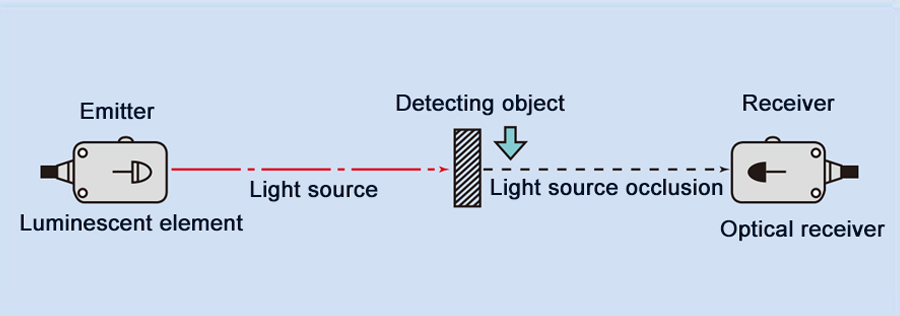
Viga pasante
El emisor/receptor está en estado de separación. Si durante el lanzamiento se coloca un objeto de detección entre el transmisor/receptor, el transmisor...
La luz quedará bloqueada.
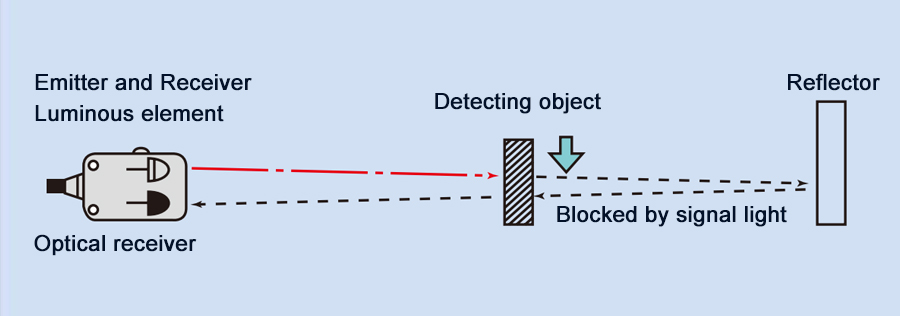
Reflexión retro
El elemento emisor y el receptor de luz están integrados en un sensor. El amplificador recibe la luz reflejada del objeto detectado. La luz del elemento emisor se refleja a través del reflector y se recibe a través de un elemento receptor óptico. Si se toca el objeto detectado, este quedará bloqueado.
Característica
Detección sin contacto
La detección se puede realizar sin contacto, por lo que no rayará el objeto detectado ni lo dañará.El sensor en sí mismo prolonga su vida útil y elimina la necesidad de mantenimiento.
Puede detectar una variedad de objetos.
Puede detectar una variedad de objetos por la cantidad de reflexión o sombreado de la superficie.
(Vidrio, metal, plástico, madera, líquido, etc.)
Longitud de la distancia de detección
Sensor fotoeléctrico de alta potencia para detección a larga distancia.
TIPO
Reflexión difusa
La luz se proyecta sobre el objeto detectado y se recibe la luz reflejada del objeto detectado para su detección.
• Instale únicamente el cuerpo del sensor, que no ocupa espacio.
• Sin ajuste del eje óptico.
• También se pueden detectar cuerpos transparentes si la reflectividad es alta.
• Discernimiento de colores
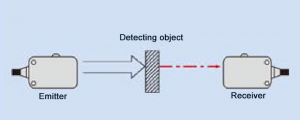
Viga pasante
El objeto se detecta detectando el eje óptico entre el transmisor y el receptor opuestos.
• Larga distancia de detección.
• Alta precisión de posición de detección.
• Incluso si es opaco, se puede detectar directamente independientemente de la forma, el color o el material.
• Resiste la suciedad y el polvo de la lente.
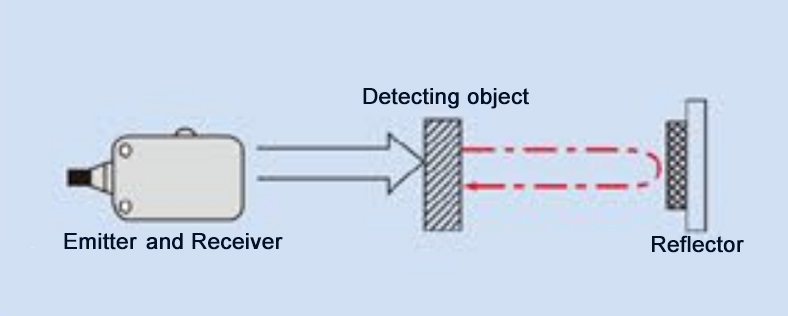
Reflexión retro
El objeto se detecta detectando la luz devuelta por el reflector después de que se emite el sensor.
• Como reflector de un solo lado, se puede instalar en espacios pequeños.
• Cableado simple, en comparación con el tipo reflectante, detección de larga distancia.
• El ajuste del eje óptico es muy fácil.
• Incluso si es opaco, se puede detectar directamente independientemente de la forma, el color o el material.
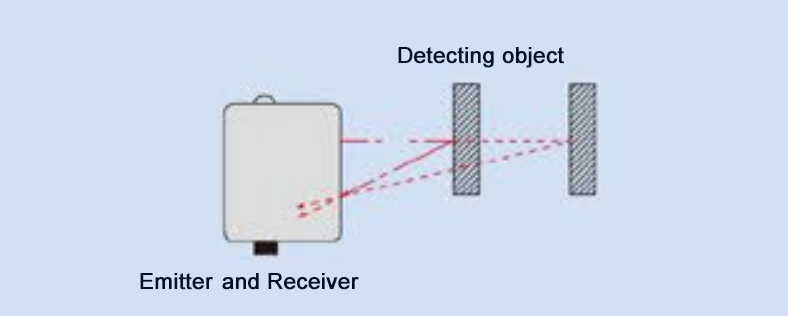
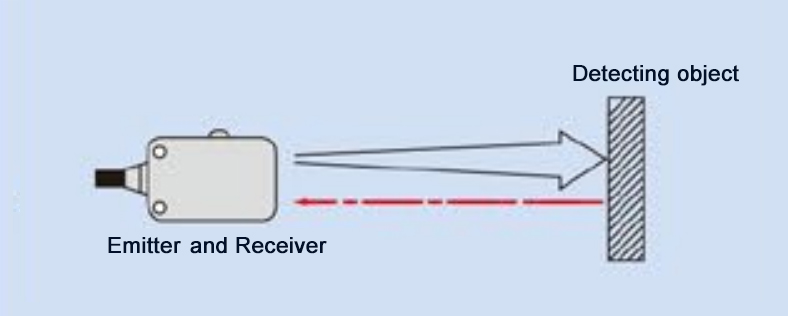
Supresión de fondo
El punto de luz se proyecta sobre el objeto detectado y se prueba a través de la diferencia de ángulo de luz reflejada desde el objeto detectado.
• Menos susceptible al material de fondo con alta reflectividad.
• La detección de estabilidad se puede realizar incluso si el color del objeto detectado y la reflectividad del material son diferentes.
• Detección de alta precisión de objetos pequeños.
Láser a través del haz y reflexión difusa
Tipo reflectante para discriminación de brillo
Hora de publicación: 31 de enero de 2023