Med den snabba ökningen av antalet stadsfordon står traditionell parkeringshantering inför problem som låg effektivitet och resursslöseri. Ultraljudssensorer kan avsevärt förbättra parkeringseffektiviteten och hanteringen av parkeringsplatser genom att övervaka beläggningsstatus i realtid.

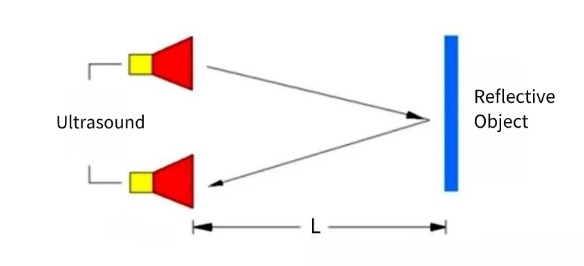
Ultraljudssensorer fungerar enligt principen om ljudvågsreflektion. En sändare avger högfrekventa ultraljudspulser, som reflekteras från hinder (som fordon) och återvänder till en mottagare. Genom att beräkna tidsskillnaden för ljudvågorna att färdas till och från ett objekt, mäter systemet avståndet exakt.
När ett fordon kör in i en parkeringsplats detekterar sensorn avståndsförändringen och utlöser en statusuppdatering. Denna kontaktlösa mätmetod undviker fysiskt slitage och är lämplig för komplexa miljöer.
Det smarta parkeringssystemet avgör parkeringsplatsens status genom förinställda tröskelvärden. Om ultraljudsvågorna som avges av sensorn "passerar fritt" inom det förinställda området identifieras platsen som ledig. Omvänt, om ultraljudsvågorna är "blockerade" inom det förinställda området, identifieras platsen som upptagen. Resultaten vidarebefordras i realtid via indikatorlampor (gul för upptagen, grön för ledig) och en central skärm, vilket säkerställer att både förare och administratörer kan få tillgång till informationen snabbt.
För att hantera flervägsreflektionsstörningar orsakade av väggar, markytor, intilliggande fordon etc. kräver ultraljudssensorer inte bara noggrann uppmärksamhet på installationspositionen utan använder även kärnalgoritmer som **tidsgrindning** och **strålformning** för att minimera detekteringsfel. Vid val av sensorer är det lämpligt att välja modeller med en **smal strålvinkel** för att undvika falska detekteringar till följd av en alltför bred strålvinkel. Dessutom säkerställer utnyttjandet av **synkroniseringsfunktionen** hos ultraljudssensorer att även när de installeras sida vid sida påverkas de inte av varandras utsända ljudvågor. Genom att använda flera sensorer för att arbeta tillsammans kan felaktiga bedömningar på grund av andra hinder minskas avsevärt.

| Avkänningsområde | 200–4000 mm |
| Blindt område | 0–200 mm |
| Upplösningsförhållande | 1 mm |
| Repeteringsnoggrannhet | ±0,15 % av fullt skalvärde |
| Absolut noggrannhet | ±1% (kompensation för temperaturdrift) |
| Svarstid | 300 ms |
| Växelhysteres | 2mm |
| Switchfrekvens | 3Hz |
| Fördröjning av strömpåslag | <500ms |
| Arbetsspänning | 9...30 VDC |
| Tomgångsström | ≤25mA |
| Utgångsindikation | Röd lysdiod: Inget mål detekterat i inlärningsläge, alltid på; |
| Gul lysdiod: I normalt arbetsläge, brytarstatus; | |
| Blå lysdiod: Mål detekterat i inlärningstillstånd, blinkar; | |
| Grön LED: Strömindikatorlampa, alltid på | |
| Inmatningstyp | Med inlärningsfunktion |
| Omgivningstemperatur | -25℃…70℃(248–343K) |
| Förvaringstemperatur | -40℃…85℃ (233–358K) |
| Utgångsegenskaper | Stöd för uppgradering av serieport och ändring av utgångstyp |
| Material | Kopparnickelplätering, epoxiharts fylld med glaspärlor |
| Skyddsgrad | IP67 |
| Förbindelse | 4-polig M12-kontakt/2 m PVC-kabel |
Ultraljudssensorer, med sin precision och tillförlitlighet, har blivit en transformerande kraft inom modern parkeringshantering. För det första optimerar de parkeringsprocesser genom att minska den tid förarna lägger på att leta efter parkeringsplatser, vilket förbättrar användarupplevelsen.
För det andra, genom integration av data från flera sensorer, möjliggör smarta parkeringssystem effektiv allokering av parkeringsresurser. Denna metod minskar också effektivt arbetskraftskostnaderna och förbättrar den operativa effektiviteten. Från att förbättra den dagliga parkeringseffektiviteten till att stödja makroskopisk trafikplanering, blir ultraljudssensorernas tillämpningsvärde alltmer framträdande och ger avgörande tekniskt stöd för den långsiktiga utvecklingen av intelligenta transportsystem.
Publiceringstid: 20 januari 2026