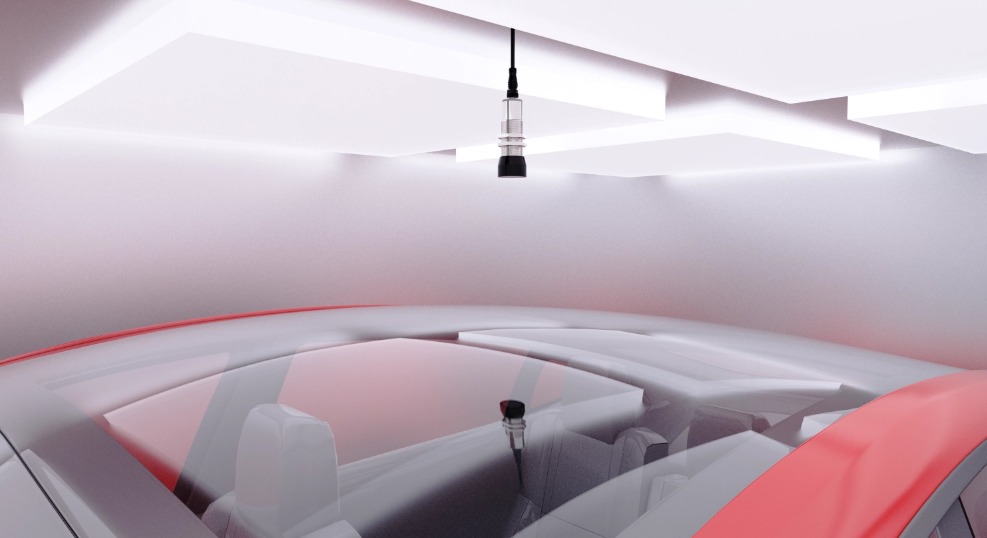
Med den raske økningen i antall bykjøretøy står tradisjonell parkeringsplassforvaltning overfor problemer som lav effektivitet og ressurssløsing. Ultralydsensorer kan forbedre parkeringseffektiviteten og parkeringsplassadministrasjonen betydelig ved å overvåke beleggstatus i sanntid.

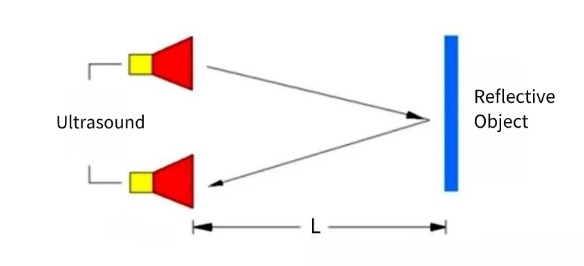
Ultralydsensorer fungerer etter prinsippet om lydbølgerefleksjon. En sender sender ut høyfrekvente ultralydpulser, som reflekteres fra hindringer (som kjøretøy) og returnerer til en mottaker. Ved å beregne tidsforskjellen for lydbølgene å bevege seg til og fra et objekt, måler systemet nøyaktig avstand.
Når et kjøretøy kjører inn i en parkeringsplass, registrerer sensoren endringen i avstand og utløser en statusoppdatering. Denne kontaktløse målemetoden unngår fysisk slitasje og er egnet for komplekse miljøer.
Det smarte parkeringssystemet bestemmer parkeringsplassens status gjennom forhåndsinnstilte terskler. Hvis ultralydbølgene som sendes ut av sensoren «passerer fritt» innenfor det forhåndsinnstilte området, identifiseres plassen som ledig. Hvis ultralydbølgene derimot er «blokkert» innenfor det forhåndsinnstilte området, identifiseres plassen som opptatt. Resultatene formidles i sanntid via indikatorlamper (gul for opptatt, grønn for ledig) og en sentral skjerm, noe som sikrer at både sjåfører og administratorer har rask tilgang til informasjonen.
For å håndtere flerveisrefleksjonsforstyrrelser forårsaket av vegger, bakkeoverflater, tilstøtende kjøretøy osv., krever ultralydsensorer ikke bare nøye oppmerksomhet på installasjonsposisjonering, men bruker også kjernealgoritmer som **tidsstyring** og **stråleforming** for å minimere deteksjonsfeil. Når du velger sensorer, anbefales det å velge modeller med en **smal strålevinkel** for å unngå falske deteksjoner som følge av en for bred strålevinkel. I tillegg sikrer utnyttelse av **synkroniseringsfunksjonen** til ultralydsensorer at selv når de er installert side om side, påvirkes de ikke av hverandres utsendte lydbølger. Ved å distribuere flere sensorer for å samarbeide, kan falske vurderinger på grunn av andre hindringer reduseres betydelig.

| Føleområde | 200–4000 mm |
| Blindområde | 0–200 mm |
| Oppløsningsforhold | 1 mm |
| Repetisjonsnøyaktighet | ±0,15 % av full skalaverdi |
| Absolutt nøyaktighet | ±1 % (kompensasjon for temperaturdrift) |
| Responstid | 300 ms |
| Bryterhysterese | 2 mm |
| Byttefrekvens | 3Hz |
| Forsinkelse på oppstart | <500 ms |
| Arbeidsspenning | 9...30 VDC |
| Tomgangsstrøm | ≤25mA |
| Utgangsindikasjon | Rød LED: Ingen mål oppdaget i innlæringstilstand, alltid på; |
| Gul LED: I normal driftsmodus, bryterstatus; | |
| Blå LED: Mål registrert i innlæringstilstand, blinker; | |
| Grønn LED: Strømindikatorlampe, alltid på | |
| Inndatatype | Med innlæringsfunksjon |
| Omgivelsestemperatur | -25℃…70℃(248–343K) |
| Lagringstemperatur | -40℃…85℃ (233–358K) |
| Utgangsegenskaper | Støtt oppgradering av seriell port og endre utgangstype |
| Materiale | Kobbernikkelbelegg, epoksyharpiks fylt med glassperler |
| Beskyttelsesgrad | IP67 |
| Forbindelse | 4-pinners M12-kontakt/2 m PVC-kabel |
Ultralydsensorer, med sin presisjon og pålitelighet, har blitt en transformerende kraft innen moderne garasjehåndtering. For det første optimaliserer de parkeringsprosesser ved å redusere tiden sjåfører bruker på å lete etter parkeringsplasser, og dermed forbedre brukeropplevelsen.
For det andre, gjennom integrering av data fra flere sensorer, muliggjør smarte parkeringssystemer effektiv allokering av parkeringsressurser. Denne tilnærmingen reduserer også effektivt lønnskostnader og forbedrer driftseffektiviteten. Fra å forbedre den daglige parkeringseffektiviteten til å støtte makroskopisk trafikkplanlegging, blir bruksverdien av ultralydsensorer stadig mer fremtredende, og gir kritisk teknisk støtte for den langsiktige utviklingen av intelligente transportsystemer.
Publisert: 20. januar 2026