Capteur ki gen gwo estabilite ede robo yo nan ekzekisyon egzak
Deskripsyon prensipal
Yo itilize detèktè optik, mekanik, deplasman ak lòt detèktè Lanbao yo kòm sistèm sansoryèl robo a pou asire mouvman ak ekzekisyon presi robo a.

Deskripsyon Aplikasyon an
Capteur vizyon Lanbao a, capteur fòs, capteur fotoelektrik, capteur pwoksimite, capteur pou evite obstak, capteur rido limyè zòn elatriye ka bay enfòmasyon nesesè pou robo mobil ak robo endistriyèl yo ka byen fè operasyon ki enpòtan yo, tankou swiv, pozisyone, evite obstak, ak ajisteman.
Sou-kategori
Kontni prospektus la
Robo mobil
Anplis travay pwograme yo, robo mobil yo bezwen enstale tou detèktè distans enfrawouj tankou detèktè pou evite obstak ak detèktè rido limyè zòn sekirite pou ede robo yo evite obstak, swiv, pozisyone, elatriye.
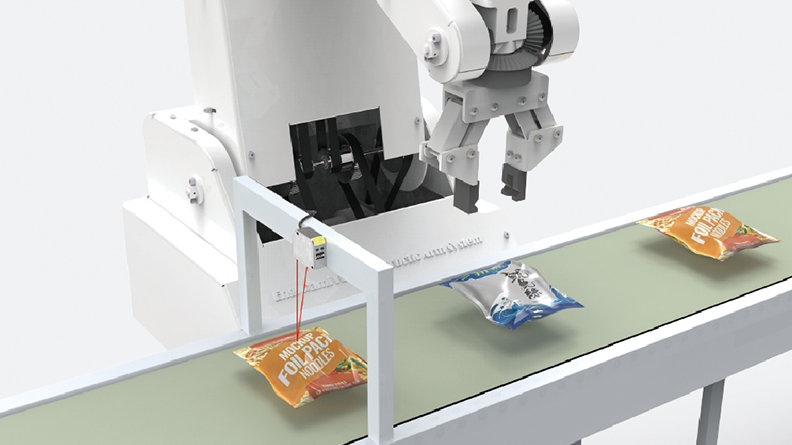
Robo Endistriyèl
Capteur lazè ki konbine avèk yon capteur endiktif bay machin nan sans vizyon ak manyen, li kontwole pozisyon sib la epi li voye enfòmasyon pou ede robo a detèmine pozisyon pyès yo pou ajiste aksyon an.