Kaupunkien ajoneuvojen määrän nopean kasvun myötä perinteinen pysäköintialueiden hallinta kohtaa ongelmia, kuten heikkoa tehokkuutta ja resurssien tuhlausta. Ultraäänianturit voivat parantaa merkittävästi pysäköinnin tehokkuutta ja pysäköintipaikkojen hallintaa seuraamalla reaaliaikaista käyttöastetta.

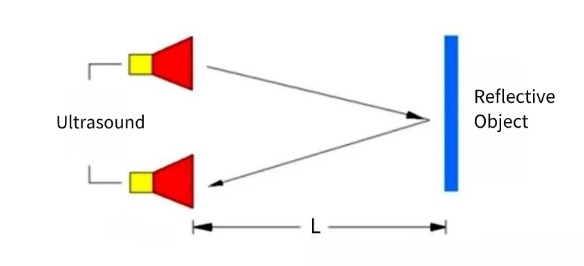
Ultraäänianturit toimivat ääniaaltojen heijastumisen periaatteella. Lähetin lähettää korkeataajuisia ultraäänipulsseja, jotka heijastuvat esteistä (kuten ajoneuvoista) ja palaavat vastaanottimeen. Laskemalla ääniaaltojen kulkemiseen kuluvan aikaeron kohteeseen ja siitä pois, järjestelmä mittaa etäisyyden tarkasti.
Kun ajoneuvo ajaa pysäköintiruutuun, anturi havaitsee etäisyyden muutoksen ja lähettää tilapäivityksen. Tämä kontaktiton mittausmenetelmä välttää fyysistä kulumista ja sopii monimutkaisiin ympäristöihin.
Älykäs pysäköintijärjestelmä määrittää pysäköintipaikan tilan ennalta asetettujen kynnysarvojen avulla. Jos anturin lähettämät ultraääniaallot "kulkevat vapaasti" ennalta asetetun alueen sisällä, paikka tunnistetaan tyhjäksi. Jos taas ultraääniaallot "estyvät" ennalta asetetun alueen sisällä, paikka tunnistetaan varatuksi. Tulokset välitetään reaaliajassa merkkivalojen (keltainen varatulle, vihreä tyhjälle) ja keskusnäytön kautta, mikä varmistaa, että sekä kuljettajat että järjestelmänvalvojat pääsevät tietoihin nopeasti.
Seinien, maanpintojen, viereisten ajoneuvojen jne. aiheuttamien monitieheijastushäiriöiden ratkaisemiseksi ultraääniantureiden asennuksen sijoittelun on oltava tarkkaa, ja niissä on käytettävä myös ydinalgoritmeja, kuten **aikaohjausta** ja **säteenmuodostusta**, tunnistusvirheiden minimoimiseksi. Antureita valittaessa on suositeltavaa valita malleja, joissa on **kapea sädekulma**, jotta vältetään liian leveästä sädekulmasta johtuvat virheelliset havainnot. Lisäksi ultraääniantureiden **synkronointiominaisuuden** hyödyntäminen varmistaa, että vaikka ne asennettaisiin vierekkäin, toistensa lähettämät ääniaallot eivät vaikuta niihin. Käyttämällä useita antureita yhteistyössä voidaan vähentää merkittävästi muiden esteiden aiheuttamia virheellisiä arvioita.

| Tunnistusetäisyys | 200–4000 mm |
| Sokea alue | 0–200 mm |
| Resoluutiosuhde | 1 mm |
| Toistotarkkuus | ±0,15 % täydestä asteikosta |
| Absoluuttinen tarkkuus | ±1 % (lämpötilan ryömintäkompensaatio) |
| Vastausaika | 300 ms |
| Kytkimen hystereesi | 2 mm |
| Kytkentätaajuus | 3 Hz |
| Käynnistysviive | <500 ms |
| Käyttöjännite | 9...30 VDC |
| Tyhjäkäyntivirta | ≤25mA |
| Lähtöilmaisin | Punainen LED: Opetustilassa ei havaittu kohdetta, aina päällä; |
| Keltainen LED: Normaalissa toimintatilassa kytkimen tila; | |
| Sininen LED: Kohde havaittu opetustilassa, vilkkuu; | |
| Vihreä LED: Virran merkkivalo, aina päällä | |
| Syöttötyyppi | Opetustoiminnolla |
| Ympäristön lämpötila | -25 ℃…70 ℃ (248–343 K) |
| Säilytyslämpötila | -40 ℃…85 ℃ (233–358 K) |
| Lähtöominaisuudet | Tukee sarjaportin päivitystä ja muuttaa lähtötyyppiä |
| Materiaali | Kuparinkiilipinnoitus, lasihelmillä täytetty epoksihartsi |
| Suojausaste | IP67 |
| Yhteys | 4-nastainen M12-liitin/2 m PVC-kaapeli |
Ultraäänianturit ovat tarkkuutensa ja luotettavuutensa ansiosta mullistava voima nykyaikaisessa pysäköintihallien hallinnassa. Ensinnäkin ne optimoivat pysäköintiprosesseja vähentämällä kuljettajien pysäköintipaikkojen etsimiseen käyttämää aikaa ja parantavat siten käyttäjäkokemusta.
Toiseksi, useiden antureiden datan integroinnin ansiosta älykkäät pysäköintijärjestelmät mahdollistavat pysäköintiresurssien tehokkaan kohdentamisen. Tämä lähestymistapa myös alentaa tehokkaasti työvoimakustannuksia ja parantaa toiminnan tehokkuutta. Ultraääniantureiden sovellusarvo on yhä merkittävämpi päivittäisen pysäköinnin tehokkuuden parantamisesta makroskooppisen liikennesuunnittelun tukemiseen, ja ne tarjoavat kriittistä teknistä tukea älykkäiden liikennejärjestelmien pitkän aikavälin kehitykselle.
Julkaisun aika: 20. tammikuuta 2026