Med den hurtige stigning i antallet af bykøretøjer står traditionel parkeringspladsstyring over for problemer som lav effektivitet og ressourcespild. Ultralydssensorer kan forbedre parkeringseffektiviteten og parkeringspladsstyringen betydeligt ved at overvåge belægningsstatus i realtid.

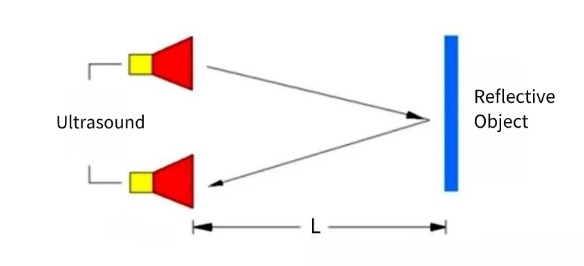
Ultralydssensorer fungerer ud fra princippet om lydbølgerefleksion. En sender udsender højfrekvente ultralydspulser, som reflekteres fra forhindringer (såsom køretøjer) og returnerer til en modtager. Ved at beregne tidsforskellen for lydbølgerne til og fra et objekt, måler systemet præcist afstanden.
Når et køretøj kører ind på en parkeringsbås, registrerer sensoren ændringen i afstand og udløser en statusopdatering. Denne kontaktløse målemetode undgår fysisk slitage og er velegnet til komplekse miljøer.
Det smarte parkeringssystem bestemmer parkeringspladsens status via forudindstillede tærskler. Hvis ultralydsbølgerne, der udsendes af sensoren, "passerer frit" inden for det forudindstillede område, identificeres pladsen som ledig. Hvis ultralydsbølgerne derimod er "blokeret" inden for det forudindstillede område, identificeres pladsen som optaget. Resultaterne videresendes i realtid via indikatorlamper (gul for optaget, grøn for ledig) og en central skærm, hvilket sikrer, at både chauffører og administratorer har hurtig adgang til oplysningerne.
For at håndtere interferens fra flere refleksioner forårsaget af vægge, jordoverflader, tilstødende køretøjer osv. kræver ultralydssensorer ikke kun omhyggelig opmærksomhed på installationsplacering, men anvender også kernealgoritmer såsom **time gating** og **beamforming** for at minimere detektionsfejl. Ved valg af sensorer anbefales det at vælge modeller med en **smal strålevinkel** for at undgå falske detektioner som følge af en for bred strålevinkel. Derudover sikrer udnyttelsen af **synkroniseringsfunktionen** i ultralydssensorer, at selv når de er installeret side om side, påvirkes de ikke af hinandens udsendte lydbølger. Ved at anvende flere sensorer til at arbejde sammen kan falske vurderinger på grund af andre forhindringer reduceres betydeligt.

| Registreringsområde | 200-4000 mm |
| Blindt område | 0-200mm |
| Opløsningsforhold | 1 mm |
| Gentagelsesnøjagtighed | ±0,15% af fuld skalaværdi |
| Absolut nøjagtighed | ±1% (kompensation for temperaturdrift) |
| Svartid | 300 ms |
| Skiftehysterese | 2 mm |
| Skiftefrekvens | 3Hz |
| Forsinkelse ved tænding | <500ms |
| Arbejdsspænding | 9...30 VDC |
| Tomgangsstrøm | ≤25mA |
| Udgangsindikation | Rød LED: Intet mål registreret i indlæringstilstand, altid tændt; |
| Gul LED: I normal driftstilstand, kontaktstatus; | |
| Blå LED: Mål registreret i indlæringstilstand, blinker; | |
| Grøn LED: Strømindikatorlampe, altid tændt | |
| Inputtype | Med teach-in-funktion |
| Omgivelsestemperatur | -25℃…70℃ (248-343K) |
| Opbevaringstemperatur | -40℃…85℃ (233-358K) |
| Udgangskarakteristika | Understøtter opgradering af seriel port og ændring af outputtype |
| Materiale | Kobberfornikling, epoxyharpiks fyldt med glasperler |
| Beskyttelsesgrad | IP67 |
| Forbindelse | 4-benet M12-stik/2 m PVC-kabel |
Ultralydssensorer er med deres præcision og pålidelighed blevet en transformerende kraft inden for moderne parkeringsstyring. For det første optimerer de parkeringsprocesser ved at reducere den tid, bilisterne bruger på at søge efter parkeringspladser, hvilket forbedrer brugeroplevelsen.
For det andet muliggør intelligente parkeringssystemer effektiv allokering af parkeringsressourcer gennem integration af data fra flere sensorer. Denne tilgang reducerer også effektivt lønomkostninger og forbedrer driftseffektiviteten. Fra forbedring af den daglige parkeringseffektivitet til understøttelse af makroskopisk trafikplanlægning bliver anvendelsesværdien af ultralydssensorer stadig mere fremtrædende og yder kritisk teknisk support til den langsigtede udvikling af intelligente transportsystemer.
Udsendelsestidspunkt: 20. januar 2026